Geospatial Data from Any Source
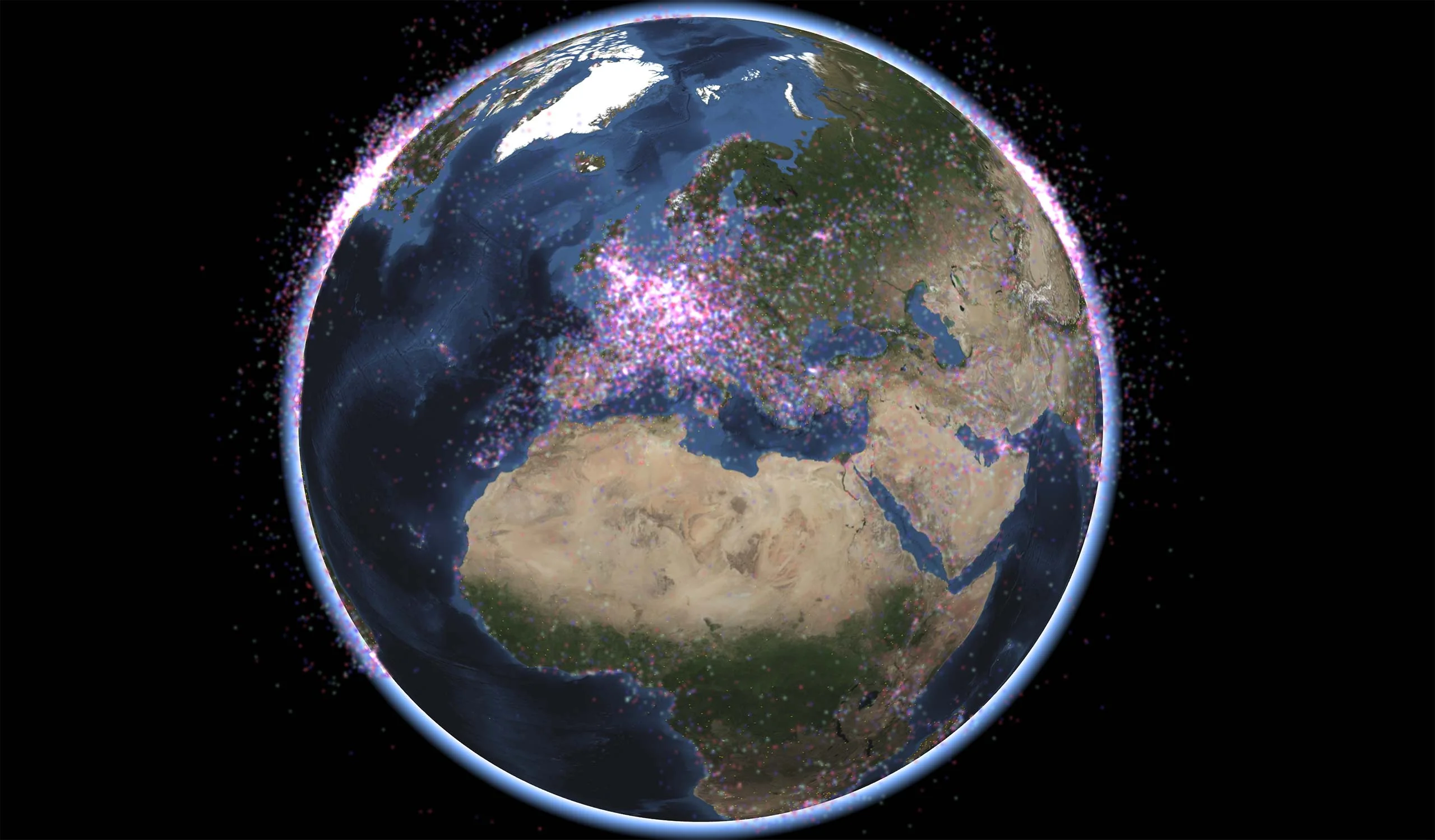
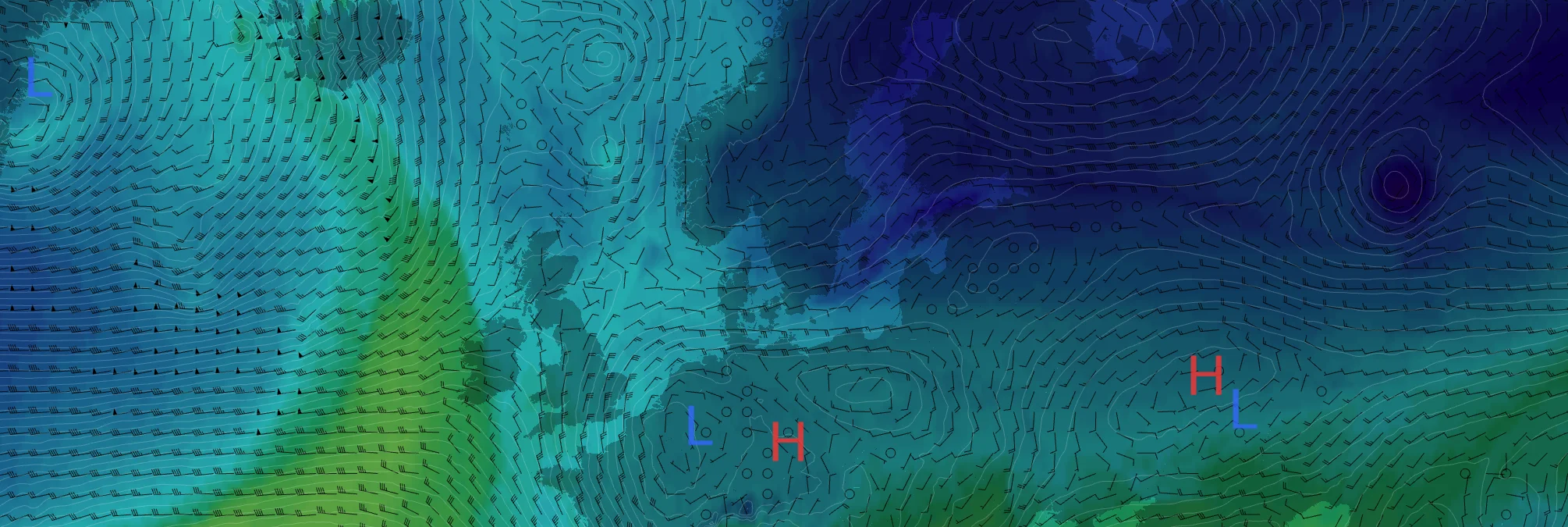
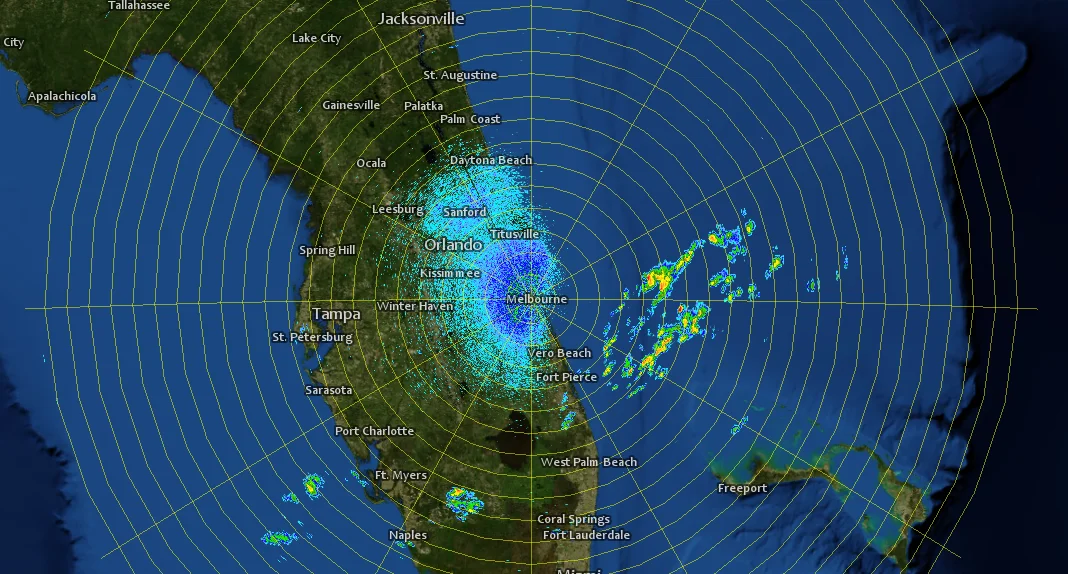
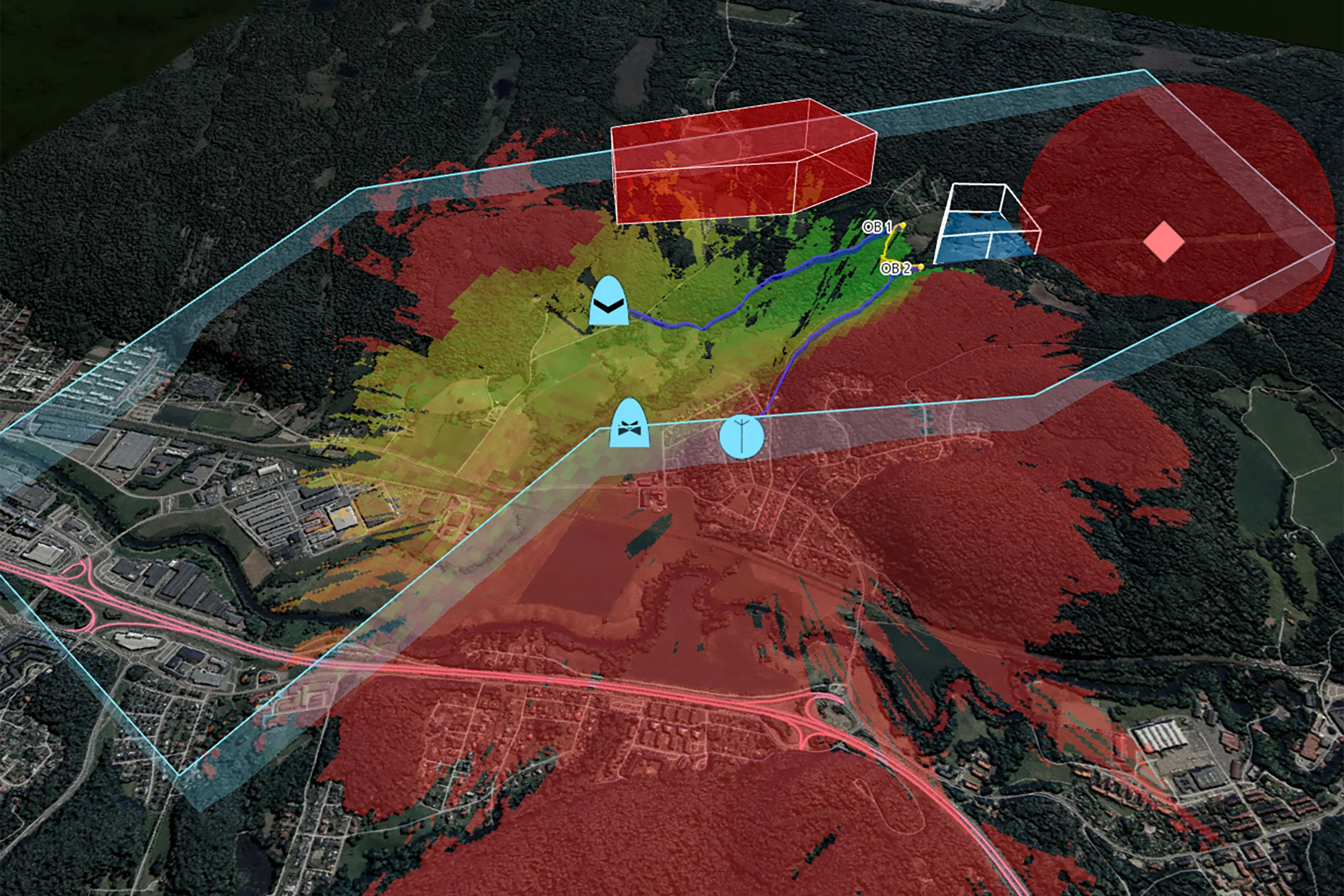
Carmenta Engine excels at handling live data. Create real-time visualizations by overlaying dynamic data – such as video streams and millions of radar plots – directly onto your maps.
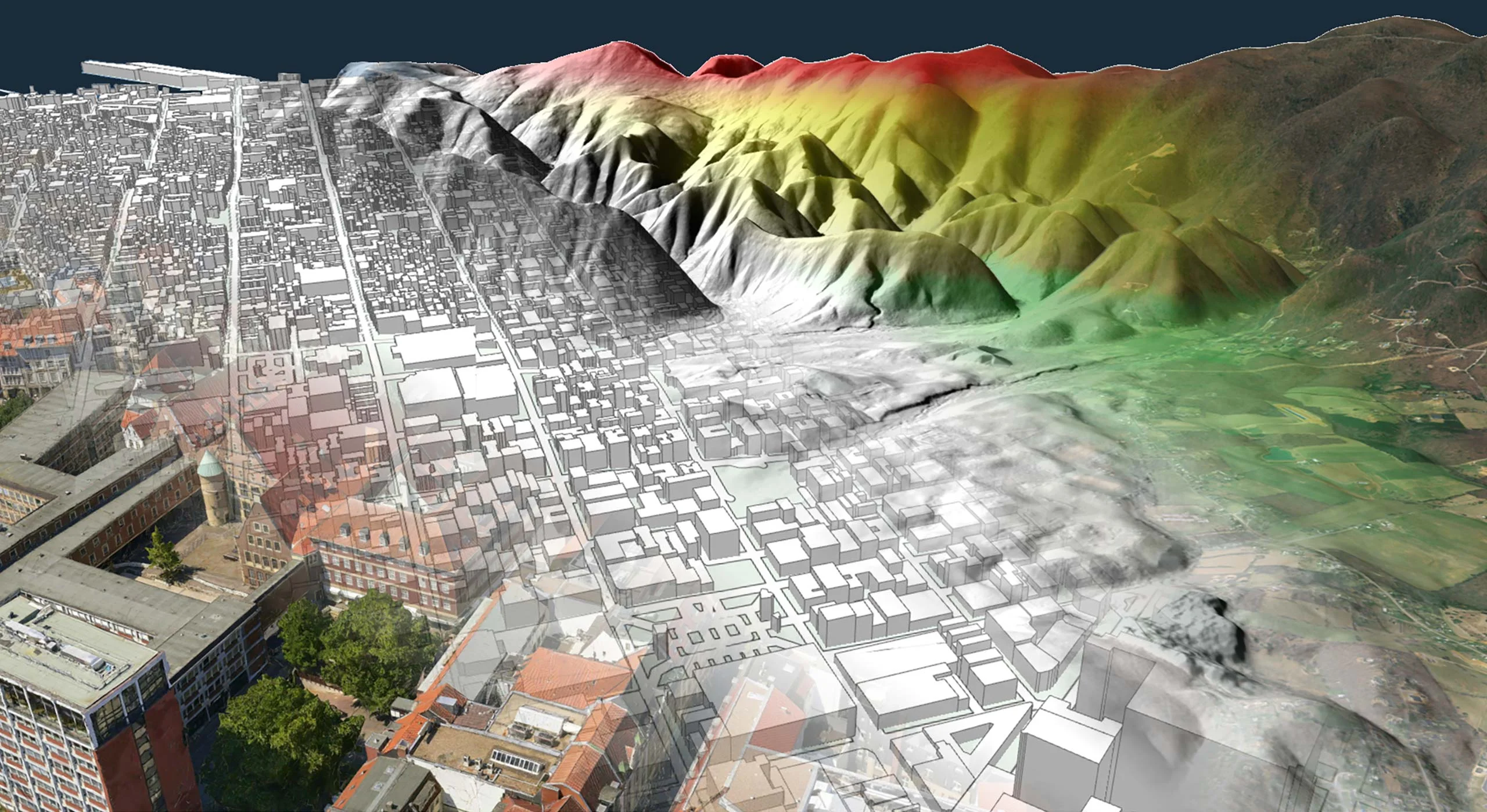
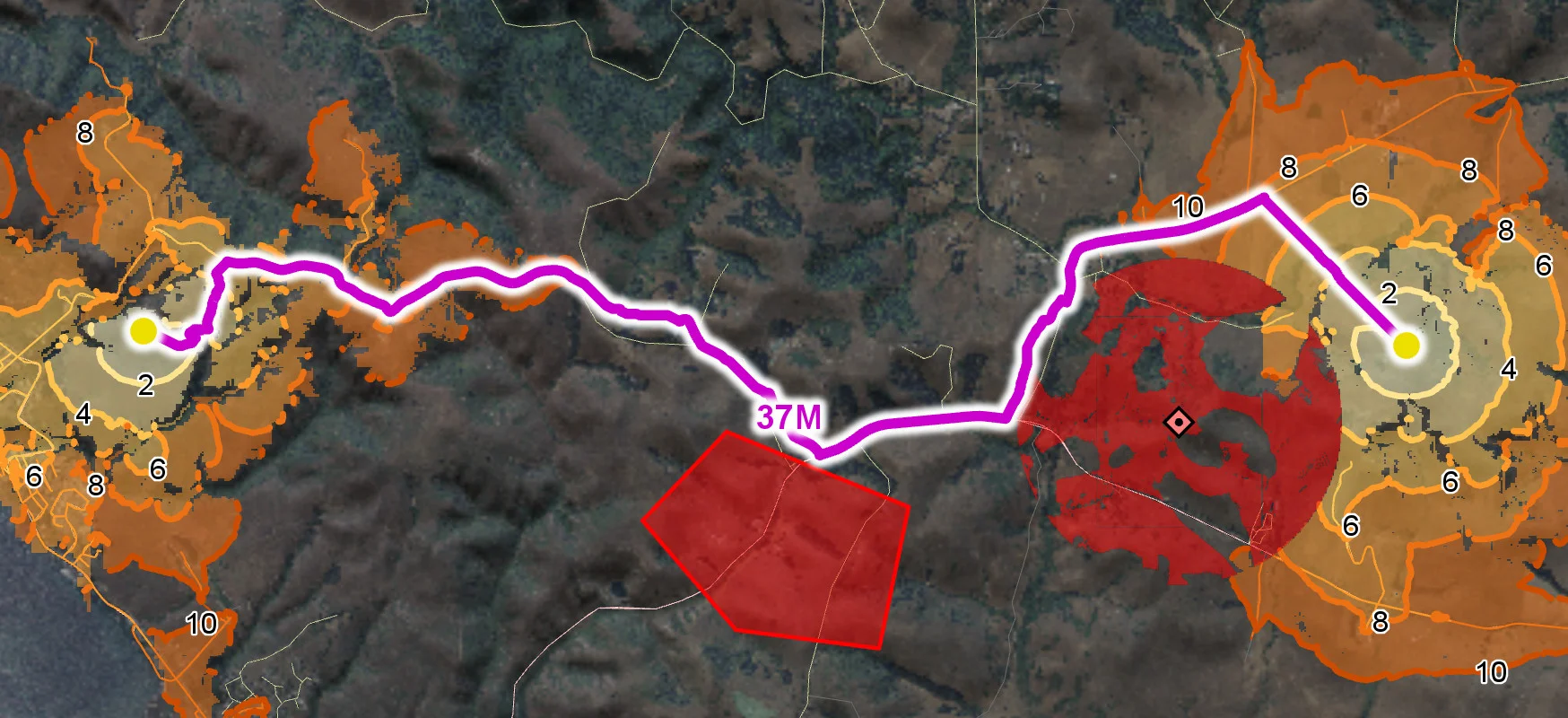
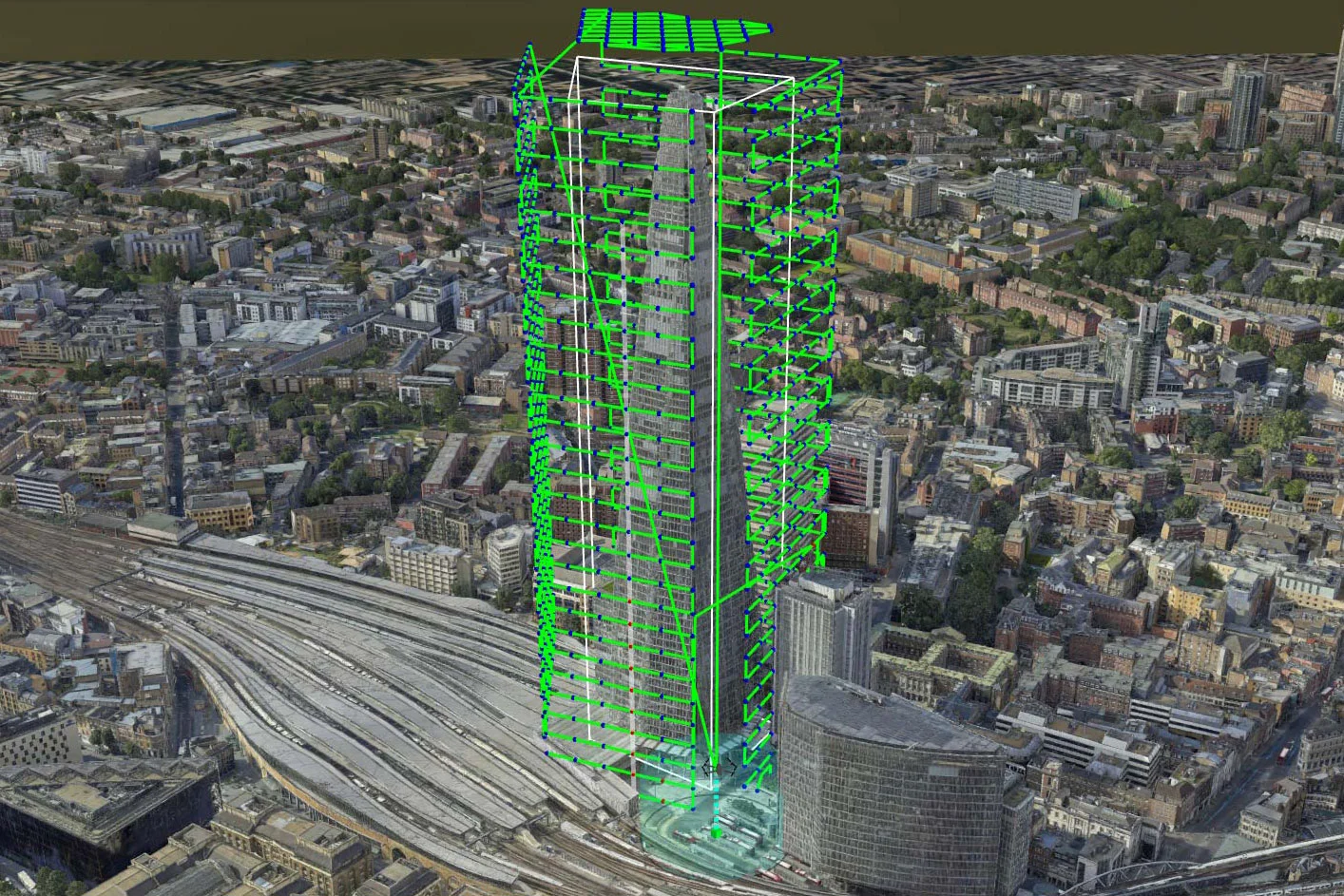
What’s more, our real-time geospatial analytics such as line-of-sight and terrain calculations can be driven by dynamic data to provide up-to-the-minute situational awareness.
Use the platform of your choice, get the same high performance everywhere. And we’ve made it as easy as possible to target several different platforms with a single code base.
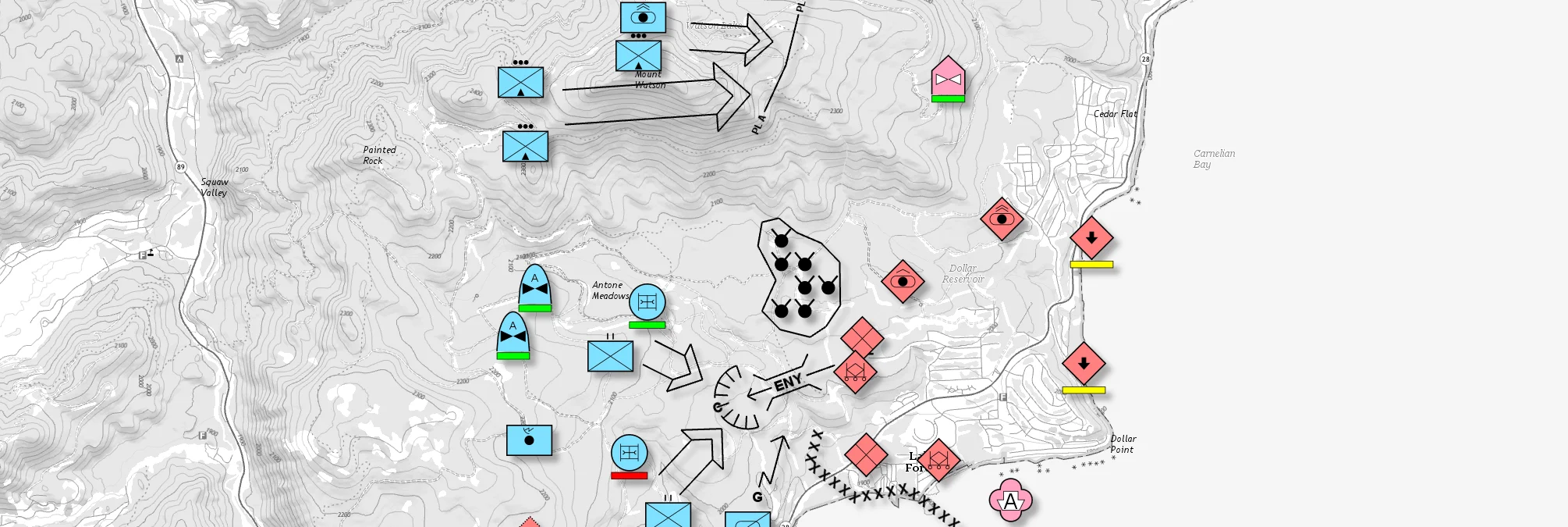
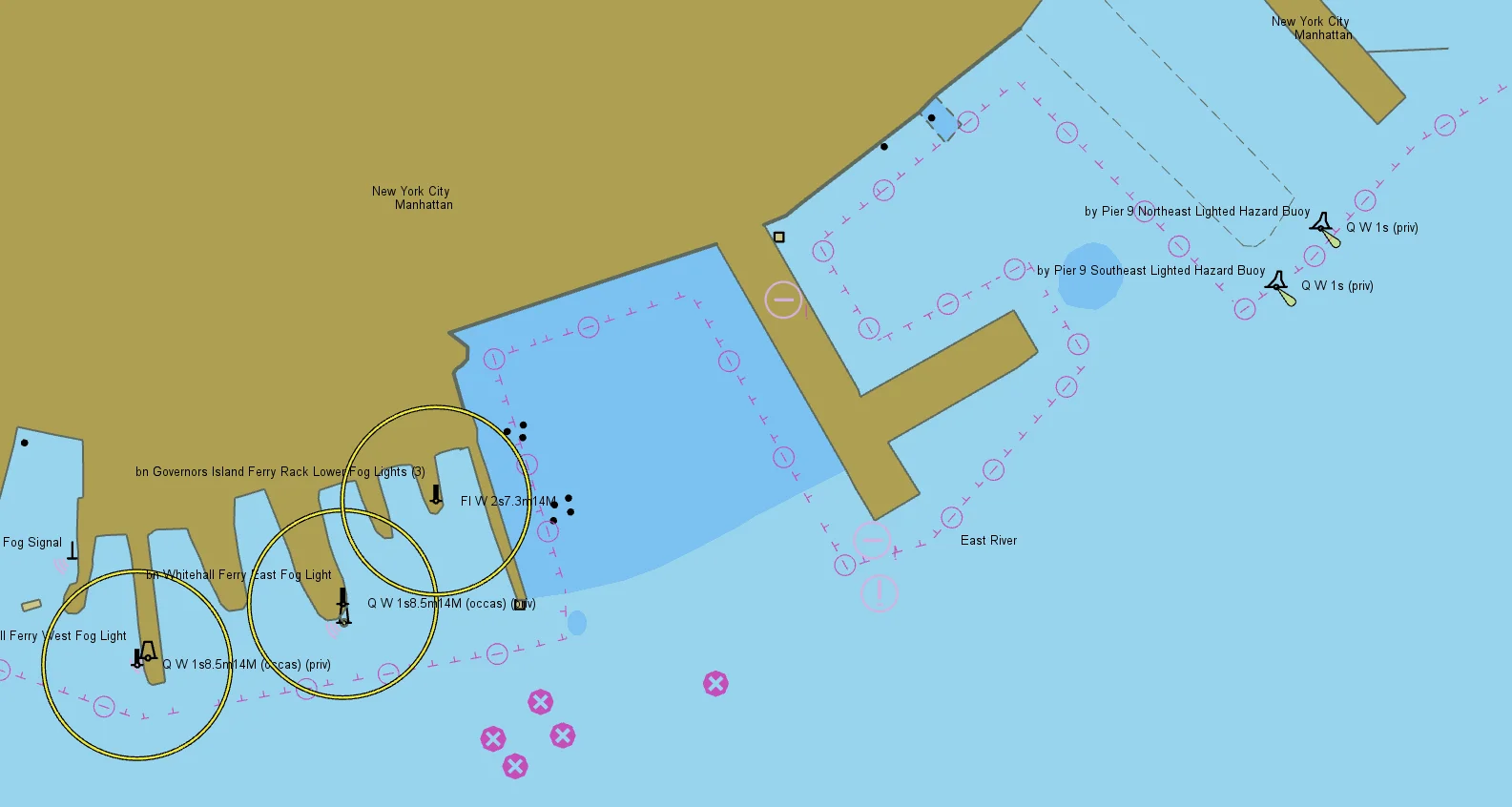
No need for conversion. Unlimited support for combining different types of geospatial information from almost all GIS data sources.
Uses the graphics card to offload the CPU. Data is loaded and processed in background threads to avoid blocking the user interface.
You can plug in your own data readers, processing steps, visualization and interaction tools to complement the built-in features.
Carmenta Engine has been designed from the ground up to be seamlessly embedded into our customers’ applications and meet the demanding requirements of mission-critical solutions. It runs on everything from high-end desktop PCs to vehicle mounted systems and Android devices.
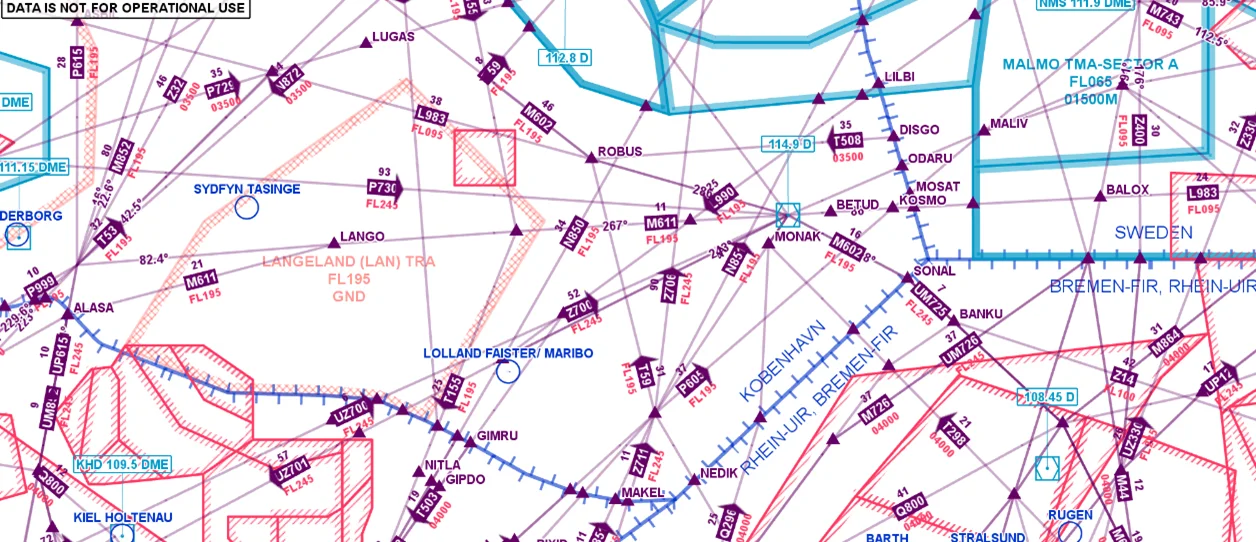
After more than twenty years of continuous service in aeronautical, nautical, and ground systems in some of the most demanding environments across the world, it has a proven record of reliability.
Carmenta Engine is designed to support your way of working. Built with an optimized C++ core, it lets you choose the programming language and graphical user interface that best suits your project and development style.





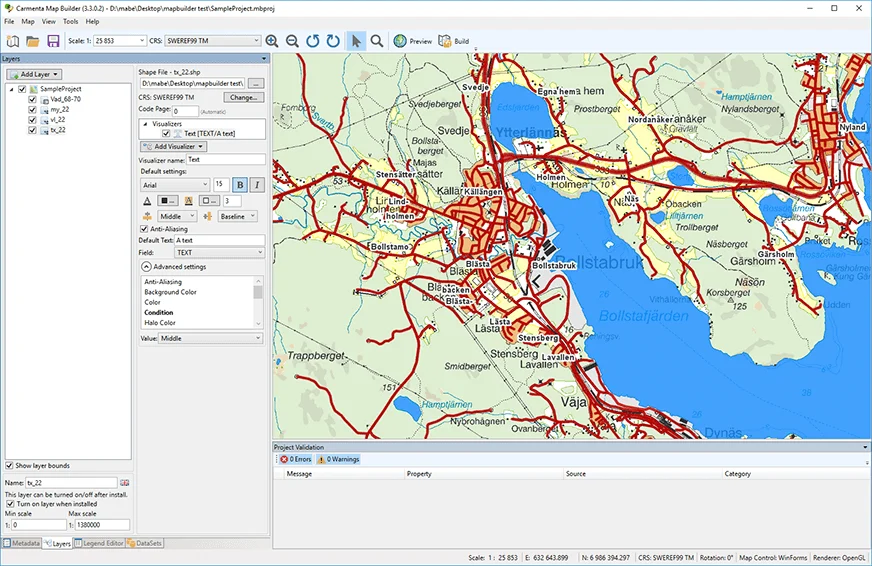
In addition to uncompromising reliability, Carmenta Engine is built for speed. Its advanced hardware accelerated rendering and data processing capabilities let you create stunning maps in no time. And the powerful visual editor Carmenta Studio (included in the SDK) makes building and editing maps as easy as dragging and dropping objects into a map configuration.
With Carmenta Engine, you can access your data wherever you want: locally or from a server in the cloud. We’re at the forefront of interoperability with support for publishing next generation OGC® API tile services built right into the SDK.

Leveraging an SDK does not only accelerate the development process and cut costs, it also increases application robustness and reliability.




Are you ready to see how our products can transform your work? Request a free trial today and explore the full potential of our geospatial technology.
Please specify which product/products you are interested in.
This form can be used to request a trial for: